|
|
| MOQ: | 1 |
| Harga: | US $3500.00 - 4900.00/ Set |
| kemasan standar: | Kotak karton/peti kayu |
| Periode pengiriman: | 6~8 minggu |
| Cara Pembayaran: | T/T |
| Kapasitas pasokan: | 500 set per tahun |
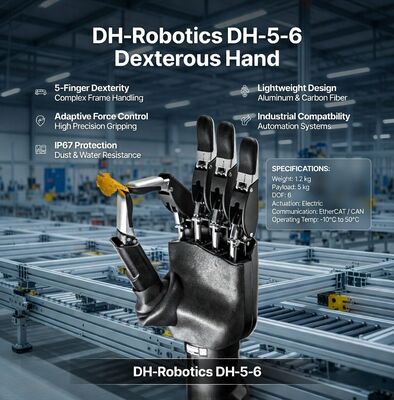
DH-Robotics DH-5-6 adalah lima jari tendon didorong tangan robot dexterous dengan 6 derajat kebebasan aktif.robot kolaboratif dan platform penelitian yang membutuhkan pemahaman seperti manusia, kontrol kekuatan dan persepsi. Tangan menggunakan aktuator linier mikro terintegrasi dan mendukung kontrol posisi-kekuatan hibrida untuk manipulasi yang tepat dan sesuai.
| Parameter | Spesifikasi |
|---|---|
| Jari | 5 jari (antropomorfik) |
| Tingkat Kebebasan yang Aktif | 6 |
| Total Sendi | 12 |
| Sistem Penggerak | Pemancar dengan alat penggerak mikro linier |
| Penginderaan | Sensor kekuatan / sentuhan |
| Mode Kontrol | Posisi + kontrol hibrida kekuatan |
| Komunikasi | CAN / RS485 / EtherCAT |
| Berat badan | Sekitar 400-550 g |
| Kekuatan Pegang Jari | 515 N per jari (biasanya) |
Silahkan berikan:
|
|
| MOQ: | 1 |
| Harga: | US $3500.00 - 4900.00/ Set |
| kemasan standar: | Kotak karton/peti kayu |
| Periode pengiriman: | 6~8 minggu |
| Cara Pembayaran: | T/T |
| Kapasitas pasokan: | 500 set per tahun |
DH-Robotics DH-5-6 adalah lima jari tendon didorong tangan robot dexterous dengan 6 derajat kebebasan aktif.robot kolaboratif dan platform penelitian yang membutuhkan pemahaman seperti manusia, kontrol kekuatan dan persepsi. Tangan menggunakan aktuator linier mikro terintegrasi dan mendukung kontrol posisi-kekuatan hibrida untuk manipulasi yang tepat dan sesuai.
| Parameter | Spesifikasi |
|---|---|
| Jari | 5 jari (antropomorfik) |
| Tingkat Kebebasan yang Aktif | 6 |
| Total Sendi | 12 |
| Sistem Penggerak | Pemancar dengan alat penggerak mikro linier |
| Penginderaan | Sensor kekuatan / sentuhan |
| Mode Kontrol | Posisi + kontrol hibrida kekuatan |
| Komunikasi | CAN / RS485 / EtherCAT |
| Berat badan | Sekitar 400-550 g |
| Kekuatan Pegang Jari | 515 N per jari (biasanya) |
Silahkan berikan: