|
|
| MOQ: | 1 |
| Harga: | US $2500.00 - 3000.00/ Set |
| kemasan standar: | Kotak Plastik + Busa |
| Periode pengiriman: | 6~8 minggu |
| Cara Pembayaran: | T/T |
| Kapasitas pasokan: | 1800 set per tahun |
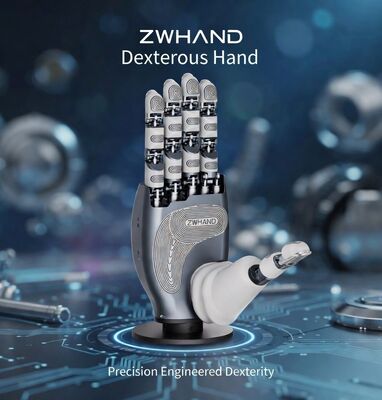
ZWHAND adalah tangan robot cekatan yang digerakkan oleh tendon 5 jari. Ini adalah solusi buatan Tiongkok yang hemat biaya untuk tangan robot humanoid, end-effector robot kolaboratif, laboratorium penelitian, dan platform pendidikan. Tangan ini menggunakan aktuator linier mikro dan penggerak tendon untuk mencapai pencengkeraman yang mirip manusia dengan kontrol gaya/posisi terintegrasi.
| Parameter | Spesifikasi |
|---|---|
| Jari | 5 jari (tata letak antropomorfik) |
| Derajat Kebebasan Aktif | 6–8 (tergantung model) |
| Total Sambungan | 12–15 (tipikal) |
| Sistem Penggerak | Digerakkan oleh tendon dengan aktuator linier mikro |
| Sensor | Sensor gaya / taktil |
| Mode Kontrol | Kontrol hibrida posisi + gaya |
| Komunikasi | CAN / RS485 / EtherCAT |
| Berat | Sekitar 400–600 g |
| Gaya Mencengkeram Jari | 5–15 N per jari (rentang tipikal) |
Mohon berikan:
|
|
| MOQ: | 1 |
| Harga: | US $2500.00 - 3000.00/ Set |
| kemasan standar: | Kotak Plastik + Busa |
| Periode pengiriman: | 6~8 minggu |
| Cara Pembayaran: | T/T |
| Kapasitas pasokan: | 1800 set per tahun |
ZWHAND adalah tangan robot cekatan yang digerakkan oleh tendon 5 jari. Ini adalah solusi buatan Tiongkok yang hemat biaya untuk tangan robot humanoid, end-effector robot kolaboratif, laboratorium penelitian, dan platform pendidikan. Tangan ini menggunakan aktuator linier mikro dan penggerak tendon untuk mencapai pencengkeraman yang mirip manusia dengan kontrol gaya/posisi terintegrasi.
| Parameter | Spesifikasi |
|---|---|
| Jari | 5 jari (tata letak antropomorfik) |
| Derajat Kebebasan Aktif | 6–8 (tergantung model) |
| Total Sambungan | 12–15 (tipikal) |
| Sistem Penggerak | Digerakkan oleh tendon dengan aktuator linier mikro |
| Sensor | Sensor gaya / taktil |
| Mode Kontrol | Kontrol hibrida posisi + gaya |
| Komunikasi | CAN / RS485 / EtherCAT |
| Berat | Sekitar 400–600 g |
| Gaya Mencengkeram Jari | 5–15 N per jari (rentang tipikal) |
Mohon berikan: